An example E1 classification map show an airfield's primary surface.
By Yaneev Golombek and Tom Cirillo
Aviation safety is always at the forefront of airfield operations. The Federal Aviation Administration (FAA) and Department of Defense (DOD) have stringent criteria regarding location and classification of airfield obstructions, which is any feature that breaks a specified plane in relation to an airfield, including terrain, vegetation, buildings, electric poles and antennas.
Within the immediate confines of the primary surfaces (such as runways and taxiways), any man-made and many natural features are considered obstructions. Moving further away from the primary surface, a virtual 3D sloped plane acts as an imaginary barrier, and all obstructions that penetrate that barrier must be accounted for. Fortunately, LiDAR and GIS provide technologies and applications for efficiently mapping and inventorying airfield obstructions.
LiDAR, Imagery and Helicopter Mapping
LiDAR sensors can collect data in four different platforms. Stationary terrestrial and mobile platforms can collect data from the ground, providing very-high-density LiDAR that may work if only concerned about primary airfield surfaces. From the air, LiDAR collects data with fixed-wing and helicopter platforms, and LiDAR vendors are beginning to commission unmanned fixed-wing and quadcopter platforms. Obstruction mapping requires a high-density option, and specifications for airfield obstruction projects may require more than 20 points per square meter.
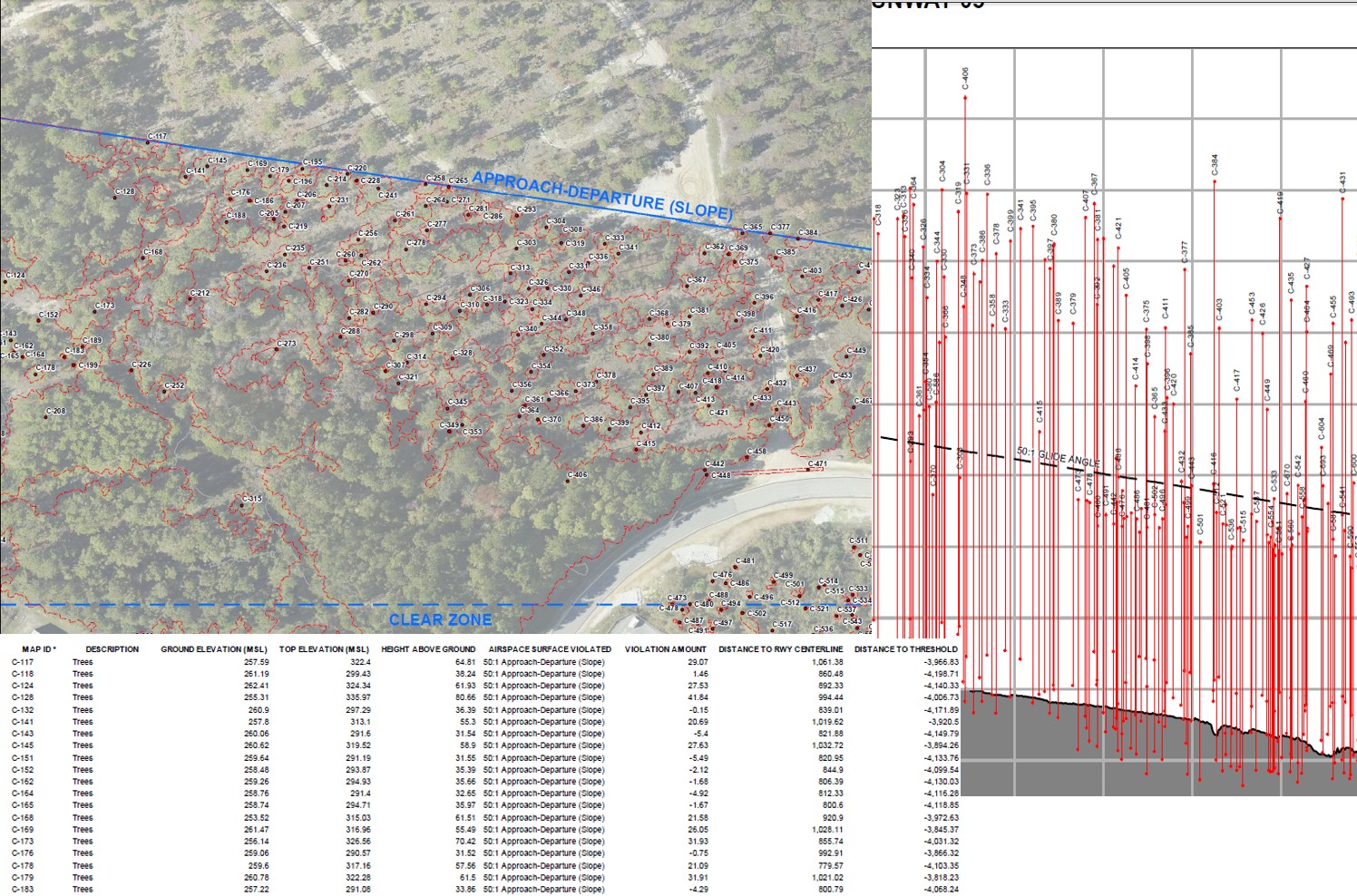
Obstructions (primarily trees) are penetrating the 50:1 glide angle near the edge of a runway.
Because obstructions range from large and natural to small man-made objects at varying elevations across many square miles, a high-density aerial-sensor platform is required to ensure no features are missed during collection. Merrick and Company commissioned a helicopter LiDAR sensor platform in 2010, alongside its fixed-winged and terrestrial platforms.
This platform consists of an Optech Orion C200 LiDAR system, a TAC 60 MP nadir camera, a CS-MS1920 false-color infrared camera, two CS-4800 interline CCD forward-oblique cameras, an AIMMS 20 meteorological sensor and a Cloud Gap gimbaled video camera. These technologies allow for high-resolution imagery to complement the aerial LiDAR surveying for optimal identification of airfield obstructions. If necessary, high-resolution forward-and-back oblique imagery is an option along with an infrared camera for vegetation detection.
High-density and large-area aerial LiDAR acquisition is most efficient when collected with a helicopter platform, because speed and above-ground level (AGL) flying height play critical roles in achieving high-density LiDAR. A fixed-wing plane typically can fly no lower than 1,000 feet above features and no slower than 100 knots (60 knots in some extreme cases). At this elevation and speed and with an average field-of-view set on the sensor, LiDAR point density (number of LiDAR points per unit of area) will amount to no more than approximately seven points per square meter.

A map shows features required for a TERPs Automation Plan. In this case, the tallest feature in each polygon is inventoried.
A helicopter, however, can collect data at much slower speeds. Above-ground flight levels can range between 200-3,000 feet. For example, flying at approximately 1,200 feet and 50 knots, a helicopter LiDAR system can collect about 25 points per square meter. The density is easily adjusted by modifying AGL and speed. Thus, a helicopter platform will provide much greater point-data density, generating a more detailed and accurate model for extracting features.
Testing Extents of LiDAR Sensitivity
When using this sensor suite for obstruction-mapping purposes, the following is an important question to consider: Will the platform collect all obstructions, without missing any?
Merrick initiated a simple test in the backyard of one of its flight operators. Eight different wires were placed on a clothesline ranging from a quarter to an eighth of an inch in width, coated and uncoated. The area was flown with the LiDAR sensor active and then filtered for first-of-many returns. Per the results in the accompanying wire test images, the sensor managed to pick up multiple shots at each end of the lines' widths, approximately every couple inches. With that, Merrick was highly confident that if an obstruction exists in the field, Merrick's Orion C200 sensor would detect it.
Airfield Obstruction Applications
Between 2011-2015, Merrick and HB&A Associates completed airfield-obstruction mapping projects for six DOD installations, two of which are tied to major international airports. Aside from airfield-obstruction packages, high-resolution topographic byproducts also were compiled, such as digital terrain, surface and elevation models along with one-foot contours. Three-inch-resolution imagery also was compiled, although the helicopter platform is capable of collecting sub-inch-resolution imagery.
To ensure optimal obstruction collection and accuracy, the installations were flown with a nominal point spacing averaging 20 points per square meter, with an RMSE(z) of 0.03 meters. Merrick and HB&A were confident that all obstruction-related features were detected at this level of collection and accuracy. In short, every square meter within the collected area of interest would contain approximately 20 high-definition survey shots.
Per DoD regulations concerning aircraft and aircrew personnel safety, military installations must conduct airfield-environment surveys to document and catalog natural and manmade features/equipment. Items within the airfield environment fall into three categories: 1) Waivers, 2) Permissible Deviations and 3) Exemptions. Depending on many factors, an object will fall into one of these categories depending on factors such as height, construction type, location and function. All these items are referred to as airfield obstructions.

Point-cloud data are draped over a 3D imagery surface in LiDAR processing software.
The authoritative document defining airspace surfaces and what criteria to use is the Unified Facilities Criteria (UFC) 3-260-01, which defines what's allowed and not allowed in certain areas of airspace around a runway. It's the job of the installation's civil engineering department to submit a report on these items and track them. These categories are defined as the following:
- Waiver (permanent, temporary or construction)“An obstruction manmade or naturally occurring that violates airspace per UFC 3-260-01 that can't be reasonably corrected (permanent) or is expected to be corrected within five years (temporary). Requests for waivers must present compelling justification to violate criteria and clearly demonstrate no viable, practical alternative.
- Permissible Deviations“An obstruction violating the airfield surfaces but is required in support of airfield operations. These objects/facilities must be built in accordance with established criteria to be considered permissible.
- Exemption“An obstruction (facility or other item) constructed/sited under a previous, typically less-stringent siting standard. No waiver is required. Facilities or other items constructed/sited under current standards that are behind and beneath a MAJCOM-approved Building Restriction Line (BRL) are considered exemptions and therefore don't require a waiver.
- BRL Exempt“An obstruction that violates UFC 3-260-01 criteria but resides behind and beneath a MAJCOM-Approved BRL. No waiver is required.
E-Map Series
Installations and DOD-affiliated airspaces maintain obstruction classifications and airfield-related maps in a series called E-Maps, and they range from the E1 Map to the E10 Map. Obstructions are documented in E1-E5 map series.

A cross section demonstrates the 50:1 glide angle near an airfield boundary. Orange/red features break the imaginary surface plane.
The E1 map documents on-installation obstructions/primary-surface obstructions, including clearance zones at each end of the runway. At the E1 level, anything that breaks the primary surface is an obstruction, including manholes, inlets, lights and trees.
The E2 map documents Approach/Departure Surfaces out to 25,000 feet from the runway. E2 (and E3) obstructions require that LiDAR data be processed with a 3D Shapefile for a glide slope that runs out from the edge of the runway. For example, a 100-foot-tall tree may break the plane and require obstruction classification near the runway, but not if located a couple miles away from the edge of the runway. The E3 documents Approach/Departure Surfaces, similar to the E2 map, but ranging from 25,000 feet out to 10 miles past the runway.
The E4 map documents obstructions within all airspace control surfaces off installation. Specifically, the E4 map displays obstructions within 10 miles of the airfield, but doesn't emphasize the Approach/Departure that E2 and E3 maps dictate. Like E2 and E3 maps, the further away a point is from the airfield, the higher the imaginary surface threshold for classifying obstructions. To extract E4 map obstructions, a GIS file of an imaginary 3D surface is broken into relevant elevation and classification zones and overlaid with LiDAR data. An internal application then extracts the points that protrude the 3D plane.
The E5 map documents all objects within a 10-mile splay from an airfield reference point off- and on-base for incorporation into the Terminal Enroute Procedures (TERPs) Automation Plan. When the splay is overlaid on LiDAR data, a simple algorithm detects the highest point in each polygon, while high-resolution imagery allows analysts to identify the point.
The other E Maps (E6-E10) focus on other aspects of the airfield unrelated to obstructions. However, LiDAR and imagery can play a critical role to create these products; the E-9 lays out the current aircraft parking plan, and the E-9.1 lays out the future parking plan. Imagery can help trace current taxi lanes and markings, enabling parking plans to be accurately computed and drawn.



A wire test details the sensitivity of the Optech Orion C200 sensor on a clothesline with multiple categories of lines. The point-cloud data are classified to only show first-of-many LiDAR point returns.
The E-10 map displays the airfield lighting systems (taxi lights, runway lights, apron lighting, etc). The high-resolution imagery and positional accuracy of LiDAR required for obstruction mapping also allows analysts to precisely locate lighting equipment without using boots on the ground in these highly sensitive airfield areas. With potentially thousands of lights, the in-office approach saved significant time by not requiring a visit to each light to acquire GPS locations.
Then and Now
The traditional method for collecting obstruction data was to conduct an airfield survey involving ground inspections using height-measuring equipment, GPS, field maps and cameras. This process took a significant amount of time, especially when multiple runways are present. Logistics for survey access is always complicated when working around highly active runways.
Today, modern geospatial technology improves the efficiency of this process. High-resolution aerial imagery is paired with high-resolution LiDAR, and a significant portion of an airfield survey is accomplished from the confines of an office desk”in the past, it was solely field oriented. Using imagery and LiDAR together, analysts can locate ground features and extract information needed to accurately catalog obstructions for multiple E-maps. Standard GIS technology allows for all obstructions to be efficiently inventoried and cataloged for various forms of analysis across multiple disciplines among an airfield's internal operations.
A ground survey still is required for primary surface obstructions specified by the E1 mapping criteria. However, heading into the survey with LiDAR and high-resolution imagery streamlines the process. Locating potential obstructions prior to the survey significantly reduces the required time in the active airfield areas. The aerial data also assist with data confirmation during post processing.
Yaneev Golombek, GISP, is a GIS applications lead and project manager with Merrick and Company; e-mail: [email protected]. Tom Cirillo is a planner and GIS Analyst at HB&A Associates; e-mail: [email protected].